
MIT создал оружие мгновенной реакции. Пока — для тенниса. Дальше — как получится

Стол, мяч, ракетка… и тысячи строк кода за каждым ударом робо-руки.
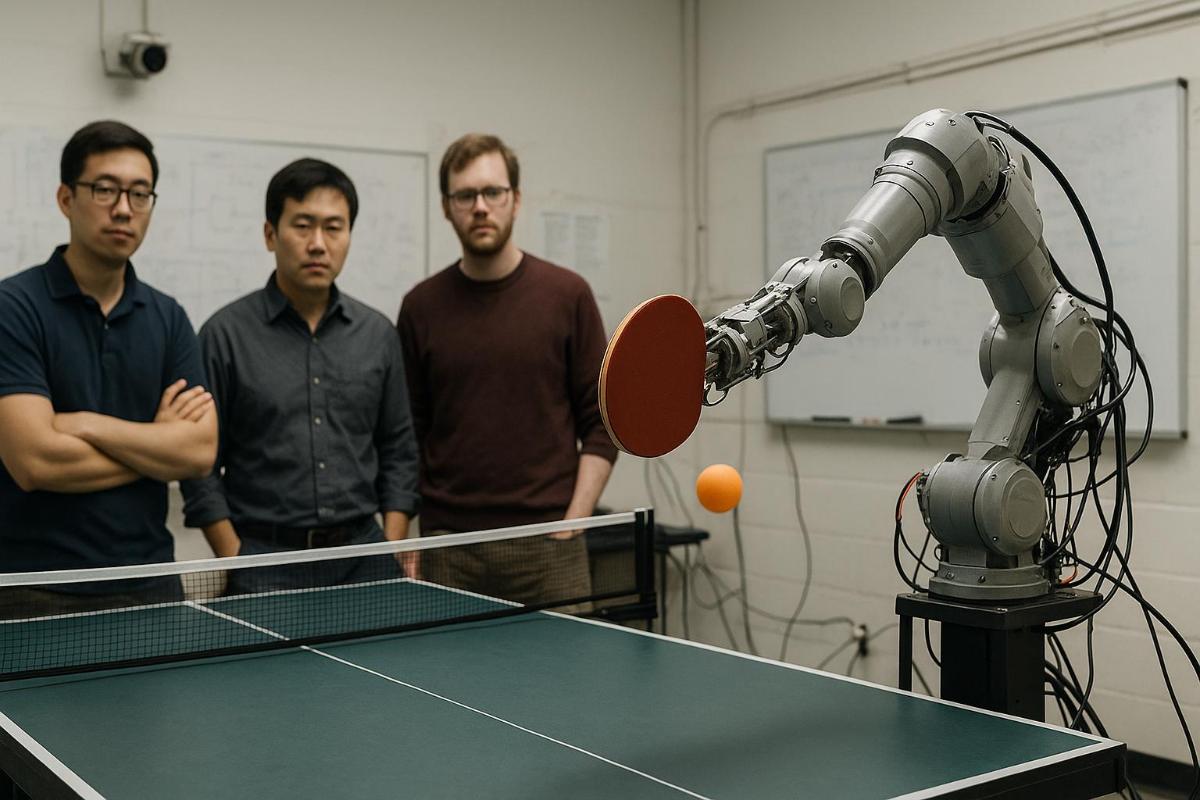
В лаборатории биомиметики MIT появился новый игрок — не человек, и даже не гуманоид, а высокоточный механизм с мгновенной реакцией. Исследователи разработали уникальную платформу, способную не просто отбивать мячи в настольном теннисе, а делать это различными способами: от классических ударов до сложных вращений. Проект представили трое специалистов — Дэвид Нгуен, Кендрик Кансо и профессор Сангбе Ким.
Новая разработка продолжает технологическую линию лаборатории, ранее представившей четырёхногого робота Mini-Cheetah. В этот раз внимание было сосредоточено на динамической манипуляции — умении точно воздействовать на быстро движущиеся объекты. Цель состояла не в создании шоу-девайса, а в построении полноценной исследовательской платформы, способной выполнять сложные действия в условиях ограниченного времени.
Поэтому и теннисный стол в этом проекте — не просто инвентарь, а средство проверки сложных алгоритмов управления. Здесь переплетаются баллистика, молниеносные реакции, высокая точность и необходимость постоянной адаптации. В отличие от статичных задач, игра требует непрерывной переоценки ситуации. Заранее предсказать траекторию подачи невозможно. Всё меняется за доли секунды — и именно это делает теннис идеальной средой для тестирования.
Не упустить мяч помогает готовое коммерческое решение, способное точно определять положение объектов в пространстве. При этом инженеры использовали размеченные шары, которые легче отслеживать на высокой скорости. Такой подход позволил резко сократить погрешности на стадии анализа (бедному роботу и так непросто).

После получения координат включается предсказательная модель, рассчитывающая, в каком месте и в какой момент шар достигнет нужной зоны. Далее формируется движение, обеспечивающее точный замах с заданными углом, скоростью и точкой соприкосновения. В расчёт принимается сразу несколько параметров, чтобы не просто отбить, а сделать это в рамках желаемой стратегии.
Особенность платформы в том, что расчёты происходят не разово, а непрерывно. Каждый миг программа уточняет траекторию манипулятора, опираясь на актуальные данные.
Выглядит это всё как модифицированная антропоморфная робо-рука. Её конструкция сочетает высокую мощность с низкой инерцией, что позволяет не только резко ускоряться, но и менять направление движения. Каждый миллиметр и миллисекунда играют решающую роль. Разработчики подчёркивают: наилучшие результаты достигаются, когда система не просто рассчитывает точку удара, а планирует весь замах — от начала до финального контакта.
Во время испытаний механизм демонстрировал уверенную игру: успех достигал 88%, а мяч улетал со средней скоростью 11 м/с. Использовались три разных стиля подачи, что позволило не только имитировать реальные условия, но и проверить, насколько оперативно устройство переключается между разными режимами.
Сейчас многие уверены, что reinforcement learning (обучение с подкреплением) решит любые прикладные задачи. Однако учёные из MIT продемонстрировали, что в системах с жёсткими физическими ограничениями более классические алгоритмы могут быть не менее эффективными.

Система уже на данном этапе подходит не только для спортивных задач. Она может применяться, например, в спасательных операциях, где требуется мгновенная реакция на движение.
Следующий этап — расширение области действия. Команда планирует установить направляющую платформу, по которой будет перемещаться манипулятор. Это даст возможность роботу смещаться вдоль всего стола и участвовать в полноценной игре с человеком, включая сложные манёвры и удары по диагонали.
Кроме того, инженеры хотят перейти к использованию обычных теннисных мячей. Это позволит напрямую сравнивать показатели с другими системами и — главное — с настоящими спортсменами.