Робот-собака ANYmal: искусственный интеллект на службе у человека
Робот находит применение в спасательных миссиях и преодолении препятствий без участия человека.

Учёные ETH Zurich обучили четвероногого робота преодолевать сложные препятствия в реальных условиях. Разработка открывает новые перспективы в подвижности роботов, которые ранее ограничивались тщательно спланированными и запрограммированными действиями.
Традиционно, достижения в области робототехники, такие как видео с паркуром или танцами роботов Boston Dynamics, требовали многократного повторения в контролируемых условиях или детального программирования каждого движения. Однако это ограничивало их способность адаптироваться к реальному миру.
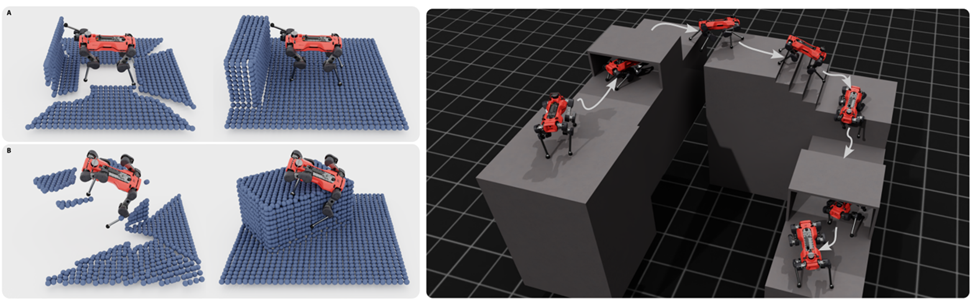
Исследователи ETH Zurich решили проблему благодаря подходу, который позволяет роботу ANYmal использовать набор базовых навыков передвижения для прохождения разнообразных препятствий на скорости до 7,24 как в помещении, так и на улице.
Видео-демонстрация движения четвероногого робота
Основой для обучения робота послужили 3 нейросети, модуль восприятия окружающей среды с помощью камер и лидара, выбор траектории движения и навыки преодоления препятствий – прыжки, взбирание и приседания. Такой интегрированный подход позволил роботу демонстрировать выдающуюся ловкость и адаптивность.
Значительным нововведением стало использование обучения с подкреплением в виртуальной симуляции, что позволило собрать обширный массив данных без необходимости ручной маркировки. В отличие от традиционных методов, где роботы учатся на основе демонстраций человека, подход ETH Zurich обеспечил эффективное обучение на большом количестве случайных сценариев.
3D-симуляция движения робота
Одной из ключевых особенностей стала автономность системы, работающей на чипах робота, что исключает необходимость во внешних вычислительных мощностях. Кроме того, демонстрация способности робота восстанавливаться после падений и скольжений подчёркивает его потенциал в применении для поисково-спасательных миссий в сложных и непредсказуемых условиях.
Несмотря на успех, перед исследователями все еще стоят задачи расширения спектра навыков робота для работы в более неструктурированных средах, что потребует обучения в разнообразных сценариях. Тем не менее, достигнутые результаты являются важным шагом к появлению роботов, способных функционировать в сложных условиях реального мира, и предвещают более заметное присутствие роботов в нашей повседневной жизни.
Не ждите, пока хакеры вас взломают - подпишитесь на наш канал и станьте неприступной крепостью!